運動制御および運動学習過程に関する研究
(1)静的筋収縮時の負荷形式の比較研究 ‐錘を牽引すべきか,不動の物体を押すべきか‐
(科学研究費補助金 基盤研究(c) 研究課題番号40406260)
{kind=link}
静的筋収縮時の負荷形式には,一定の外力(錘など)に抗して所定の関節角度を保持する肢位制御課題と,関節角度は固定された状態で一定の筋力を保持する筋力制御課題がある(図1).ニュートン力学的に同一関節トルクを必要とする静的筋収縮を二つの負荷形式によって疲労困憊まで行った時,その運動持続可能時間は筋力制御課題では肢位制御課題の2倍近く長いことや,運動中の筋放電量及び平均血圧が肢位制御課題で急激に増大することが知られているが,その生理学的機序は明らかにされていない.
本研究では,両課題による静的筋収縮中のSEP gating量に違いがあるか否かを比較検討することを目的とした.11名の被験者が示指外転位10°で最大筋力の20%を保持するFDIの静的収縮を両負荷形式でそれぞれ90秒間行った.安静時及び両課題による静的筋収縮中に右尺骨及び正中神経刺激によるSEPを頭皮上C3’より記録した.
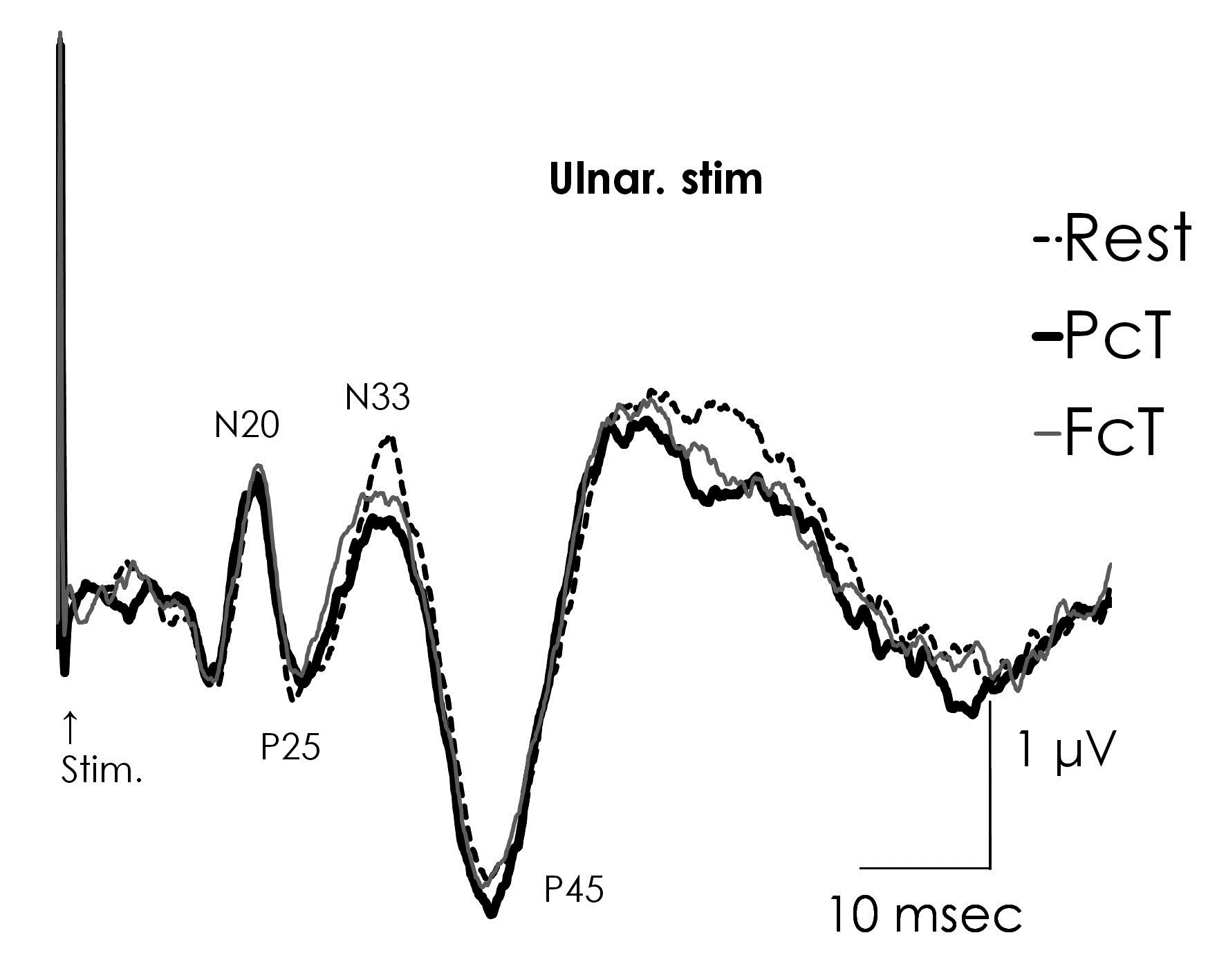
尺骨神経刺激時のみN33が肢位制御課題では筋力制御課題より有意に減少し,正中神経刺激時のGating量に課題間の差はなかった(図2).肢位制御課題では固有受容感覚情報をより多く必要とするため,筋力制御課題より末梢性Gating量が増大したと推察した.
(Kirimoto et al., Neuroscience 2011)

図1 静的筋収縮時の二つの負荷形式
肢位制御課題(A)では,一定の外力(①)に抗して示指を母指方向に開く(外転する).この時電子ゴニオメータ(②)より,示指外転角度のフィードバックを得ながら一定の関節肢位を保持する.筋力制御課題(B)では,示指外転角度はワイヤにより固定された状態で,不動の張力計(③)を一定の力で引き続ける.

図2 安静時及び各課題遂行中,尺骨神経刺激時に記録されたSEPのグランドアベレージ波形